
1.はじめに
当社では、主要業務の1つとして汎用高速制御装置※を中核とした自動制御システムの構築や制御ソフトウェアの開発を行っています。ここでは、汎用高速制御装置を適用した「カッター軌跡制御装置」について紹介いたします。
※汎用高速制御装置とは
川崎重工業(株)システム技術開発センターで開発された「多様なインターフェースを有するハードウェアラインナップ」、「ソフトウェア開発環境」、「デバッグツール」をパッケージ化したものです。多用途に適用でき、高速・高精度な制御要求に対して最適なソリューションを提供します。
2.カッター軌跡制御装置とは
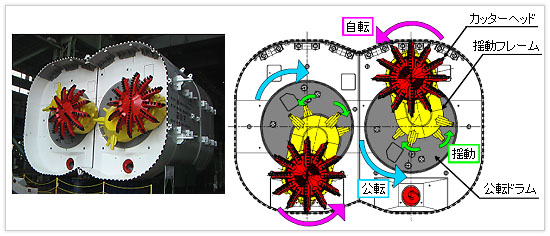
カッター軌跡制御装置は、トンネルを掘る機械であるシールド掘進機(図1)において「カッターヘッド」と呼ばれる土砂掘削部を搭載した2つの軸(公転ドラム軸、揺動フレーム軸)の角度を協調させながら時々刻々制御する装置です。人間の体に例えると、掌で希望のコースを描くために、ヒジと肩の角度を制御するような感じです。この結果、カッターヘッドが所定の軌跡に沿って移動し、意図した形状のトンネルを掘ることができます。
従来のシールド掘進機では円形断面の掘削しかできなかったのに対して、この方式では自由な断面形状のトンネルが掘削できる(図2)ため、「余分な掘削断面を減らして工事を効率化したい」、「地中支障物との間隔を十分に確保したい」などの幅広いニーズに対応できます。
【図1 シールド掘進機外観(2連型:鉄道複線用)】

【図2 軌跡制御による多様な掘削形状の例】
図1のシールド掘進機では、左右のカッターヘッドで別々の軌跡を描くことができます。このために、軌跡制御装置には合計4軸分の角度を制御するための複雑な演算を高頻度に行う性能が求められます。汎用高速制御装置(図3)はこれらの演算に対して十分な処理能力を発揮し、緻密な制御を可能にしています。
更に制御プログラムの開発過程では、シミュレーションモデルを用いた事前検証を繰り返し行い、軌跡制御性能の確認などを行いました。この結果、実機立上げから出荷までの試験を短期間かつスムースに完了することができました。
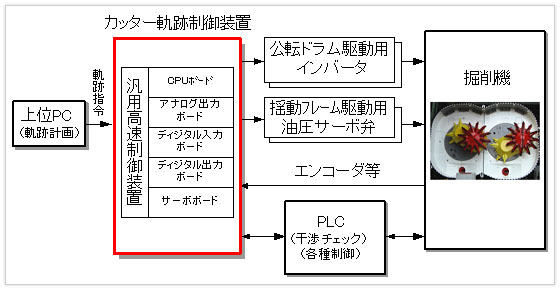
【図3 制御システム概要構成】
カッターヘッドの軌跡を制御しながらトンネルを掘るこの工法は、川崎重工業㈱と鹿島建設㈱が共同開発したこれまでにない画期的な掘削方式(アポロカッター工法)であり、土木建築業界から多くの関心が寄せられています。なお、このシールド掘進機は東京の東急東横線と東京メトロ副都心線とが相互直通運転するための渋谷~代官山間の地下化工事に投入されました。
「アポロカッター工法」(All Potential Rotary
Cutter:あらゆる可能性を秘めた回転式カッター)
川崎重工業(株)技術紹介「自由な断面形状で掘削する」(インフラ・産業機械)
